Robust object characterization
from lensless microscopy videos
This web page provides supplementary material to support the paper: "Robust object characterization from lensless microscopy videos" by Olivier Flasseur, Loïc Denis, and Corinne Fournier, submitted to EUSIPCO 2017.
Abstract
Lensless microscopy, also known as in-line digital holography, is a 3D quantitative imaging method used in various fields including microfluidics and biomedical imaging. To estimate the size and 3D location of microscopic objects in holograms, maximum likelihood methods have been shown to outperform traditional approaches based on 3D image reconstruction followed by 3D image analysis. However, the presence of objects other than the object of interest may bias maximum likelihood estimates. Using experimental videos of holograms, we show that replacing the maximum likelihood with a robust estimation procedure reduces this bias. We propose a criterion based on the intersection of confidence intervals in order to automatically set the level that distinguishes between inliers and outliers. We show that this criterion achieves a bias / variance trade-off. We also show that joint analysis of a sequence of holograms using the robust procedure is shown to further improves estimation accuracy.
Supplementary results
First experiment
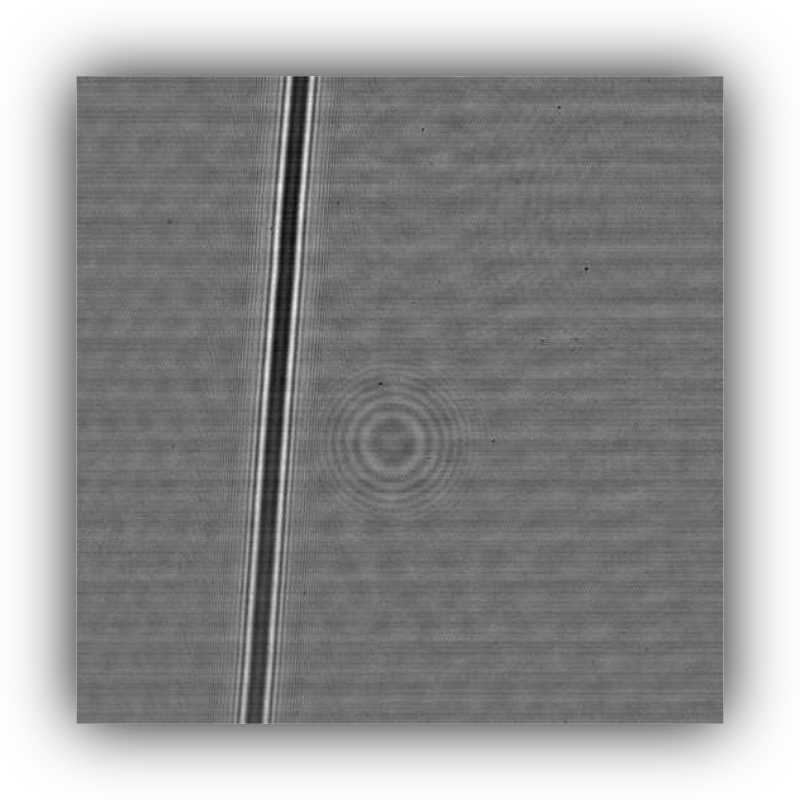
Below, we provide additional illustrations of one of the holograms processed by our robust spherical particle detection technique:
Original hologram:
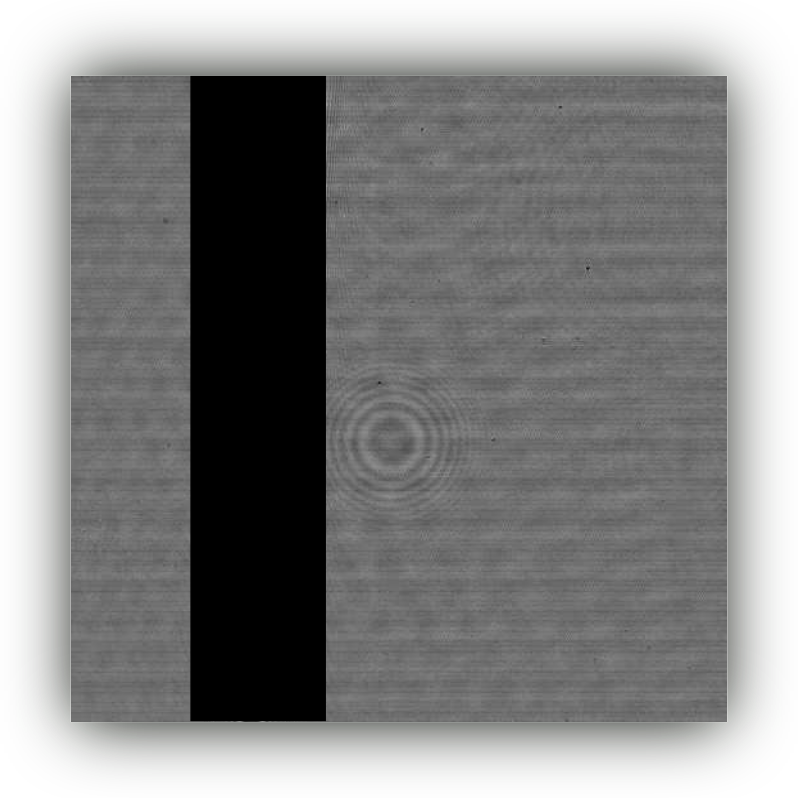
Manually masked hologram:
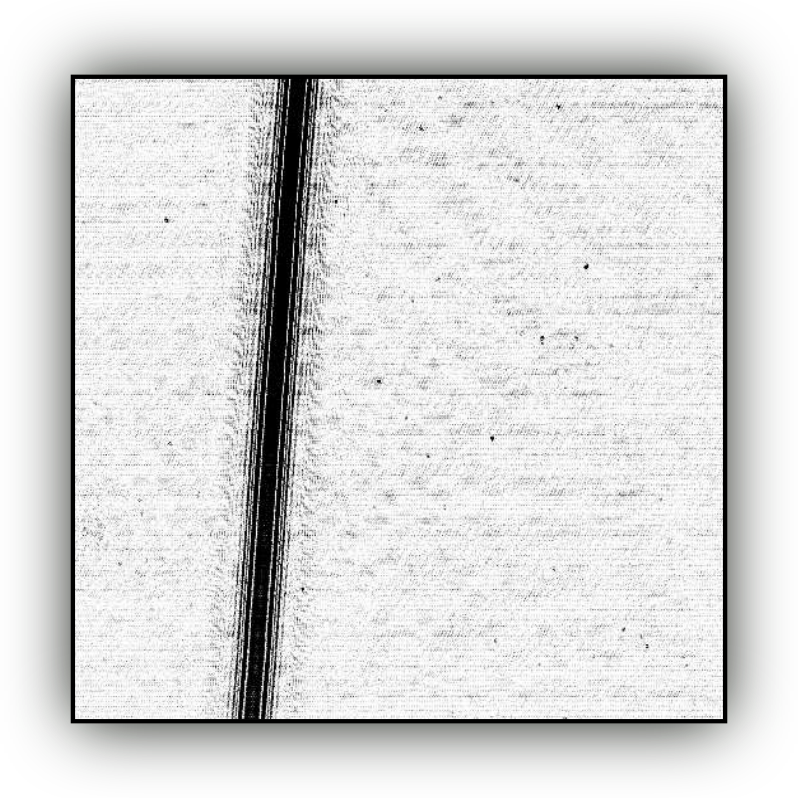
Weights computed by the iterative reweighted least squares procedure:
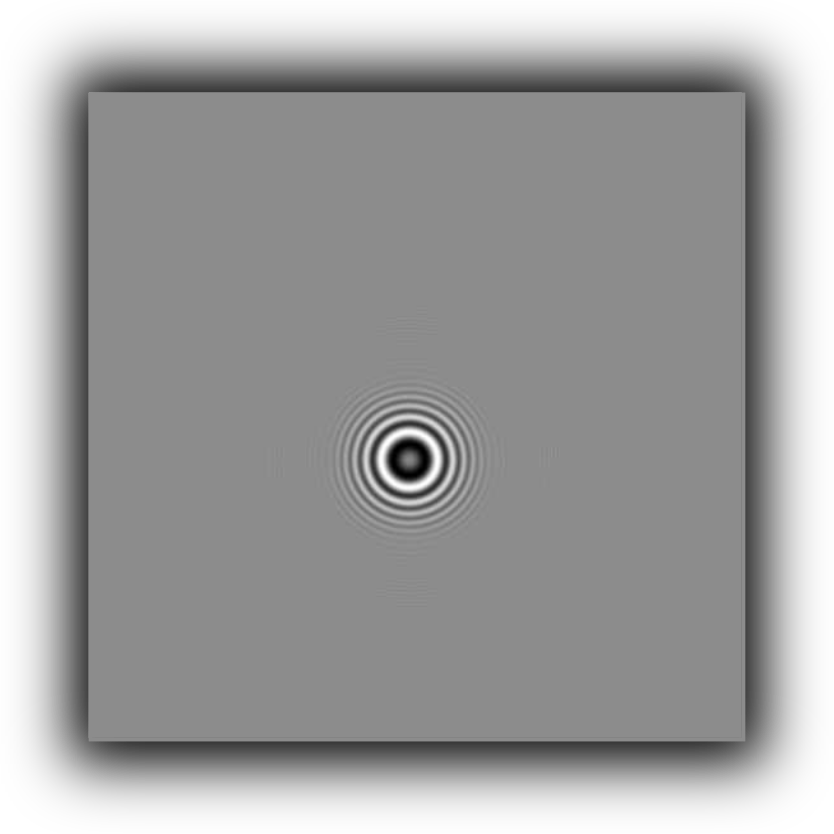
Fitted model:
Residuals:
Second experiment
Below, we provide a video of holograms of evaporating ether droplets, the reconstructed 3D trajectory of one of the droplets, the evolution of the fitted model for that droplet and the residuals (showing plumes of vapor and diffraction patterns due to other droplets). The maps of weights obtained at the end of the IRLS procedure are displayed. They clearly discard pixels where the plume of vapor or the diffraction patterns of other particles dominate the signal of interest. On the right hand side column, the evolution of the radius is displayed, showing a reduction of the droplet radius due to evaporation. Values of parameter s used in the robust estimation procedure are compared and the confidence intervals to compute s with the ICI rule are displayed.
Reconstruction video:
Created on March 2017